- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Mega 2560 - 5002 error
10-06-2011 05:47 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
even after changing the time out to 10,000 ms .stilll im getting error5002 .please help me out
10-06-2011 04:07 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Sir,
I have tried out all possible means that you have suggested but i am unable to proceed with the arduino Mega board . Once i program it receives the packets ,Rx led blinks but an error message pops up from the Init Vi . Error 5002 . Iam using win7 32 bit , i tried out with different versions , different boards of arduino(Uno, Mega ,Duemenulova) , still problem persists .Kindly help me sort out this problem , i am unable to proceed with my H-Bridge control due to this communication problem with labview and arduino all the time . Is there any stable solution for it?
Regards
Vishal
10-06-2011 04:40 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hey,
Do you guys know which version of the Arduino Bootloader you are using? If not do you know when you purchased your board? Can you upgrade to the latest version of the bootloader? How many times does the status LED on the board blink when you power it up? How many times, if any, does the status led blink when you run your LabVIEW VI?
-Sam K
LIFA Developer
10-07-2011 09:10 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Sir,
We had bought the board recently a week back MEGA 2560 ,i guess the bootloader is stk500v2 bootloader; the led blinks 12 times and once the error pops out it blinks one time . This error is popping out all the time when i run the VI . Kindly help me out.
Regards
VIshal
10-07-2011 02:36 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Yes
You have make sure that the windows device com port setting match the NI-MAX settings. First set tne windows device settings then validate the com port settings in NI-MAX
10-08-2011 06:56 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Try to change COM port number in windows.
10-09-2011 02:08 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Sir,
We made it work after one week of trouble changing the settings modifying the VIs. Still sometimes it works , sometimes it doesnt like:
1. We made a simple program for led interfacing and it is successful. Once i interface my proximity sensor in my next attempt , Error 5002 pops in . Then we created a serial buffer VI that flushes out and if we run that and then run the arduino VI , it runs well. So there is not a stable VI for running continuously the labview-arduino interface .
Since we are building a Rover that requires 8 motor with H bridge , i want to drive it using arduino-labview interface . The Init VI has a delay of 15 sec then only output signal (as in highlight execution) enters into next stage . If this is the case , then my ROV motor control will be in vain as it requires continous signal from labview-arduino , then only navigation underwater wil become possible.
The changes we made for solving :
1. NI MAX baud rate
2.COM settings in device manager (for check )
3. Serial buffer VI everytime you want to innovate in arduino or 5002 pops
Kindly suggest me a faster response for motor control ,
Regards
Vishal
10-17-2011 01:22 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Vishal,
Can you post the firmware that you are using and some example of LV code that work and dont work. This will really help me get to the bottom of this if you know that one VI worked and then adding a bit of code caused it to fail.
Thanks,
-Sam K
LIFA Developer
10-17-2011 07:01 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
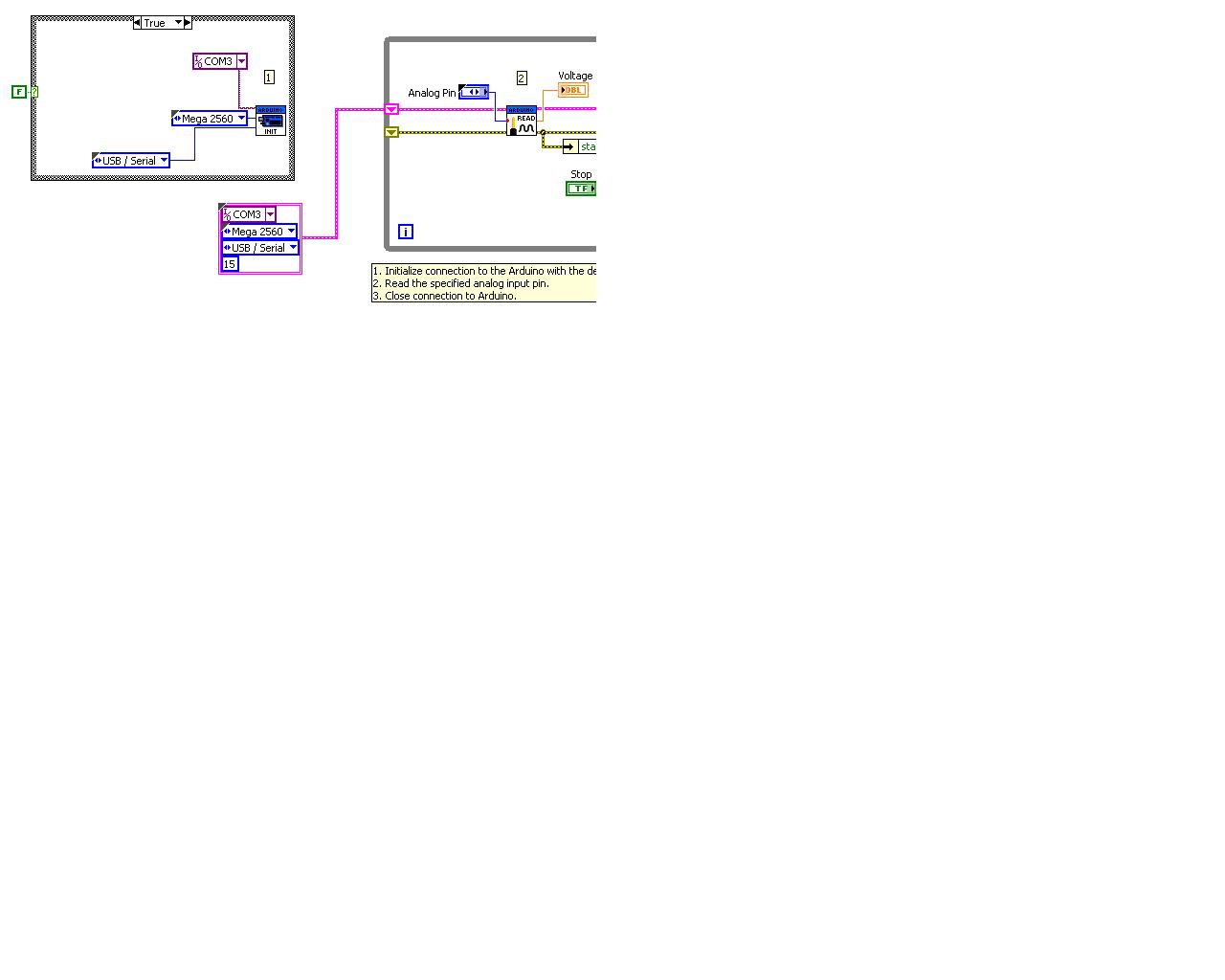
I tried to follow MAELabman comments and turned on the highlight execution. Sometimes i could get init to work, but eventually just wired out init and fed the output cluster to the while loop and I can read the voltage on an analog pin. It is late and I don't know if I am on a USB-1 port but I will try this again at a later time.
10-18-2011 08:33 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
