Sprint 8
KW 40-41, 30.09.13 - 11.10.13
Abstract
This Document is a short summary of development activities during Sprint 8 of myRIO Balancing Robot development.
It is part of the agile development model used for the development of myRIO Balancing Robot as described here: https://decibel.ni.com/content/docs/DOC-30572 and https://decibel.ni.com/content/docs/DOC-32062
Developers
Adrian Schmid, 100%, 30 Story Points
Team TU-Darmstadt, 25 Story Points
Team DHBW, 25 Story Points
Lukas Kurmann, 10 Story Points
Team Capability
90 Story Points
Initial Sprint Backlog
U-004: Data Dashboard, 3 Story Points
U-009: Vision Tracking, 100 Story Points
U-021: Electronics, 40 Story Points
U-035: Prototype Controller, 8 Story Points
U-037: Prototype Redesign (ADP, TU-Darmstadt), 100 Story Points
U-038: Courseware, 40 Story Points
Total: 291 Story Points
Impediments
Impediment 1:
U-035: Prototype Controller:
While developing U-035 the question arised, how myRIO Balancing Robot conducted later on. How should the controller be done not only for the balancing, but the driving?
Introduced U-039: Proof of Concept: Drive Controller, 8 Story Points to find a solution for that problem.
Impediment 2:
U-009: Vision Tracking:
User Story too big, changed to Epic,
U-040, U-041 and U-042 have been introduced.
Released
U-004: Data Dashboard, 3 Story Points
U-021: Electronics, 40 Story Points
U-035: Prototype Controller, 8 Story Points
U-039: Proof of Concept: Drive Controller, 8 Story Points
Total: 59 Story Points
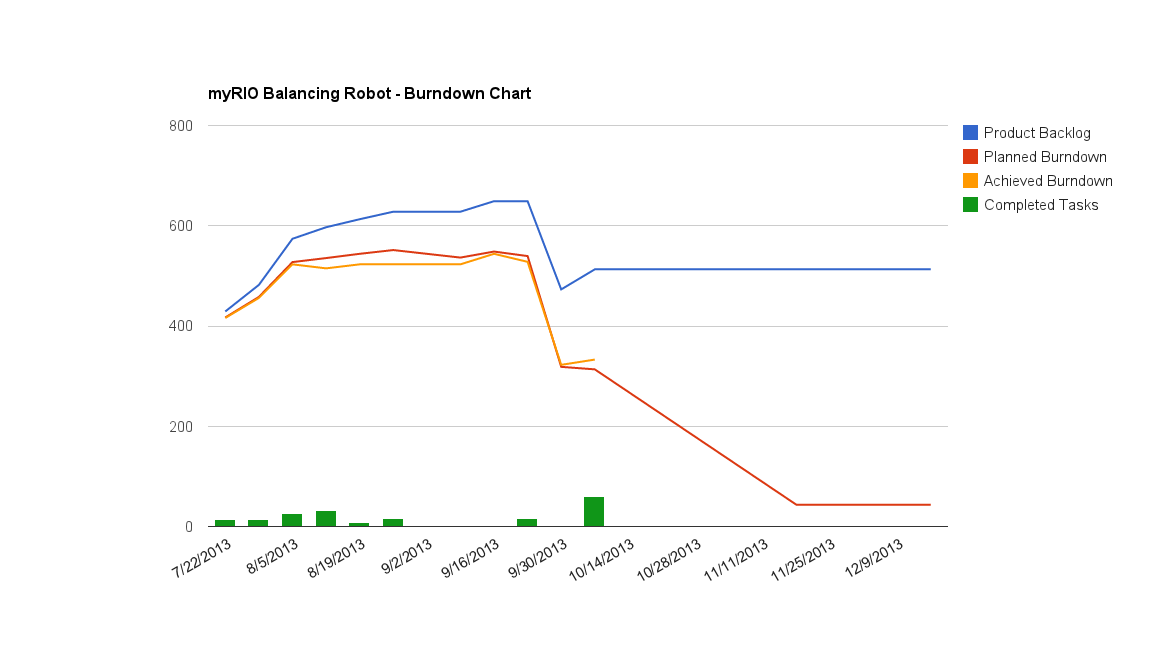
Burndown Chart
Burndown Chart at the Beginning of the Sprint.
Redimension of the product backlog.
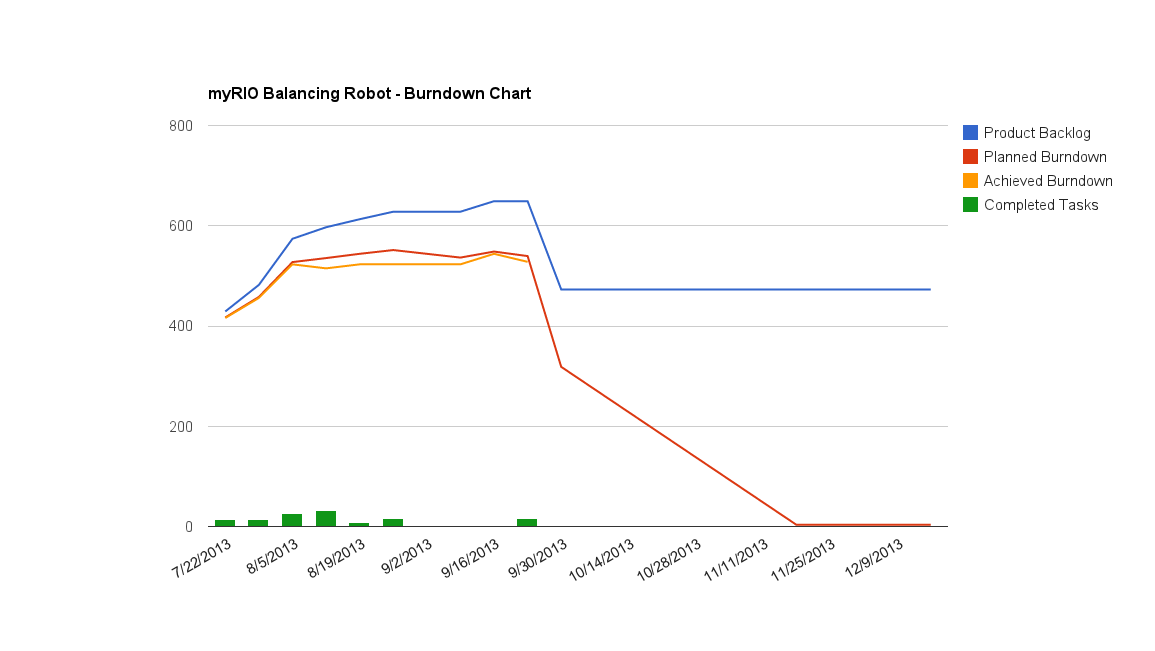
Burndown Chart at the End of the Sprint
Product Backlog has Raised again.
Releases are under plan.