- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
I'm having to restart my programing. Any helpful ideas/source material?
Solved!02-09-2013 11:27 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I just now realized while trying to deploy my code (which I had been tinkering with last from lastyear (which i was using to drive my robot for the past few weeks)), now will not deploy or build because its a file that was apart of the previous software. So there for its not connecting properly, or something. This is my second year programing (And the second year for our tear, Team 4301), and i don’t have any mentors to help. I've gone trough all ways horrible to get restarted, but i honestly still don’t have any idea what I’m doing. I really don’t want to have to call the NI helpers to guide me trough everything, because last year it took me all 6 weeks to get what I had last year. (Just to be out dated and redone by some nice programmer people at last year’s competition). So could anyone guide me to some helpful videos or something to get me re-re-started, I doing want to take forever cus we need to get practicing climbing after we get the mechanisms together? My overall programing shouldn’t be getting too crazy, just the set of cims for the drive motors, another set of cim motors with a limit switch for our arm mechanisms, a pneumatic shock and mini cim for raising or lowering our climbing mechanism up or down.
Solved! Go to Solution.
02-12-2013 11:18 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hello,
A good place to start to get back up and running would be to use the LabVIEW cRIO Robot Template which comes with the FRC 2013 DVD. With the template downloaded to the cRIO, you will be able to control two motors and drive the robot in TeleOp mode.
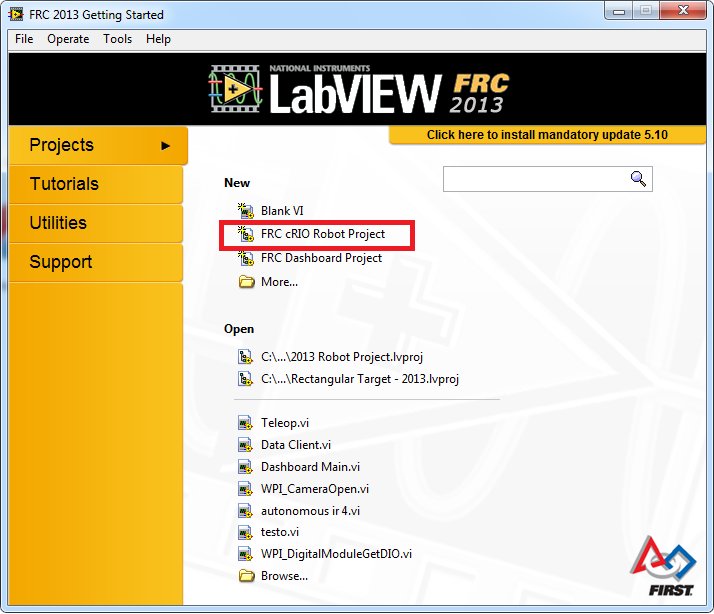
1) Start with the FRC cRIO Robot Project
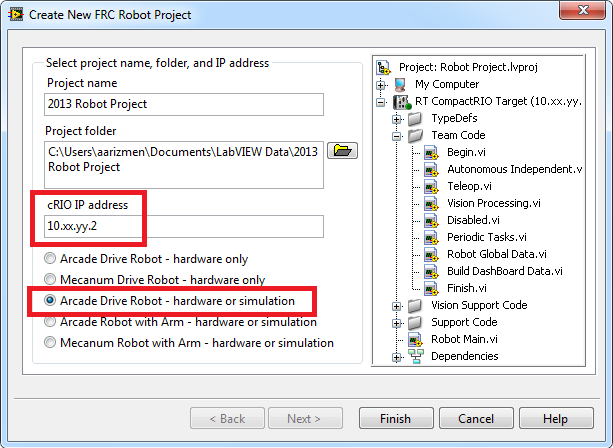
2) Configure the project to point to the cRIO's IP address (xx.yy is your TEAM ID) and choose Arcade drive.
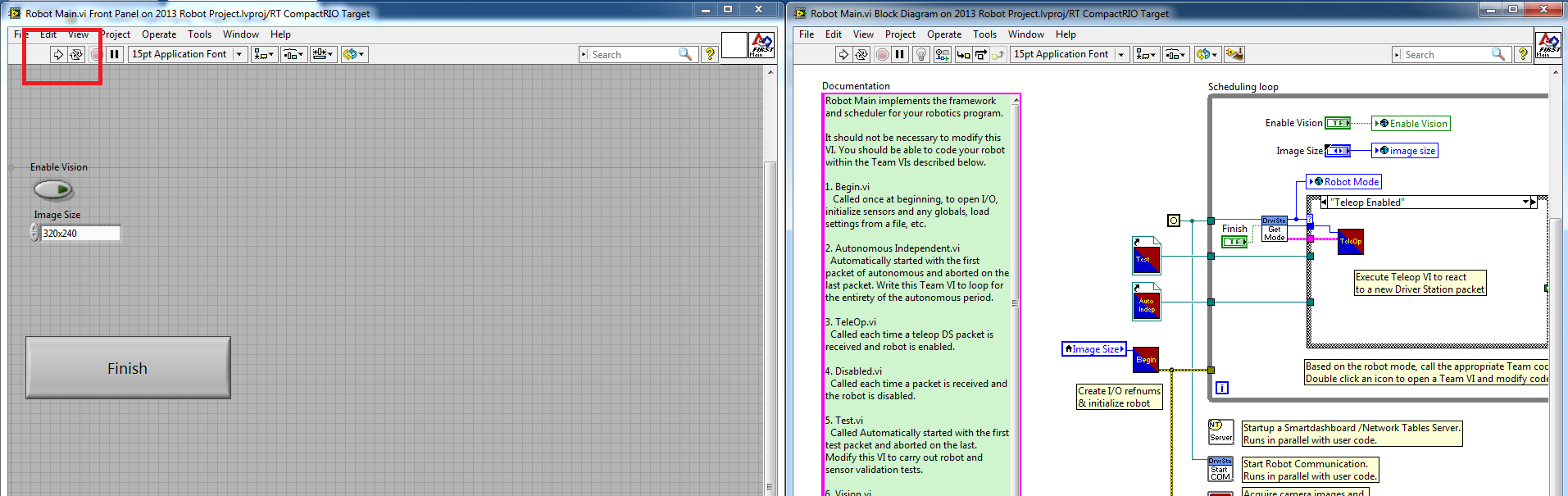
3). Open Robot Main.vi and run the VI which will deploy your code to the cRIO.
4) After it finishes deploying, start up the FRC Driver Station, make sure that your Team Number is set in the "Setup" tab. In the Operation tab, select Teleoperated and then click on the Enable button.
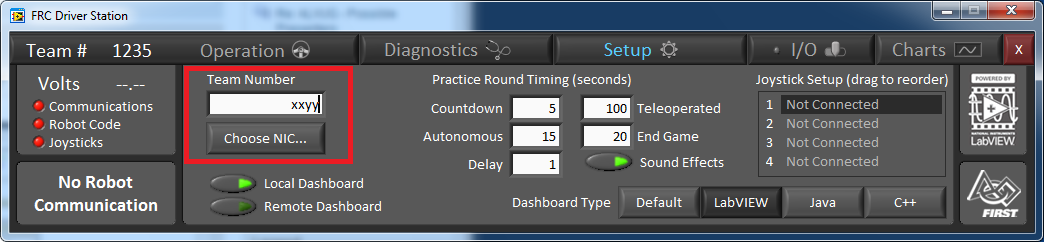
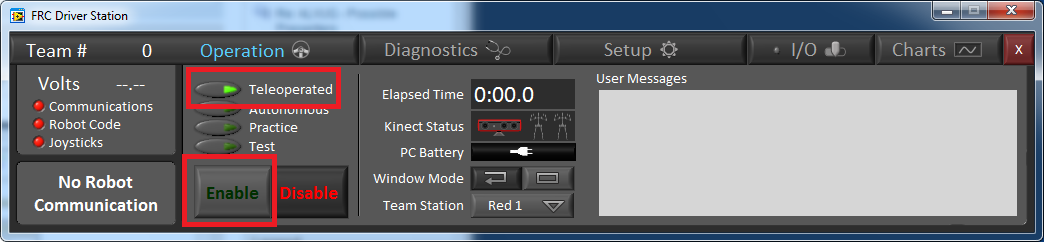
This will get your robot moving in TeleOperated mode with the Joystick.
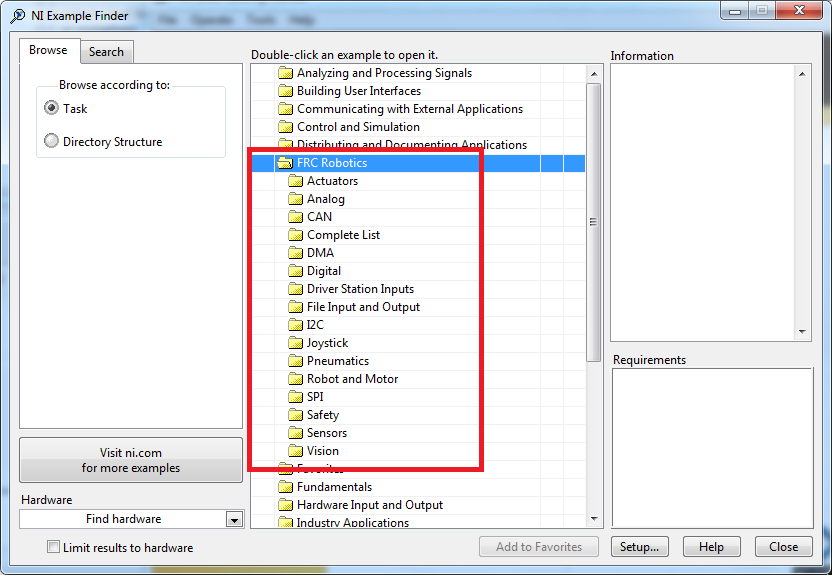
Once you have these steps completed, then you will want to continue programming your motors, limit switches, and other sensors. A really good resource which you can use are the example templates that are found in the Support section in the Getting Started Screen:
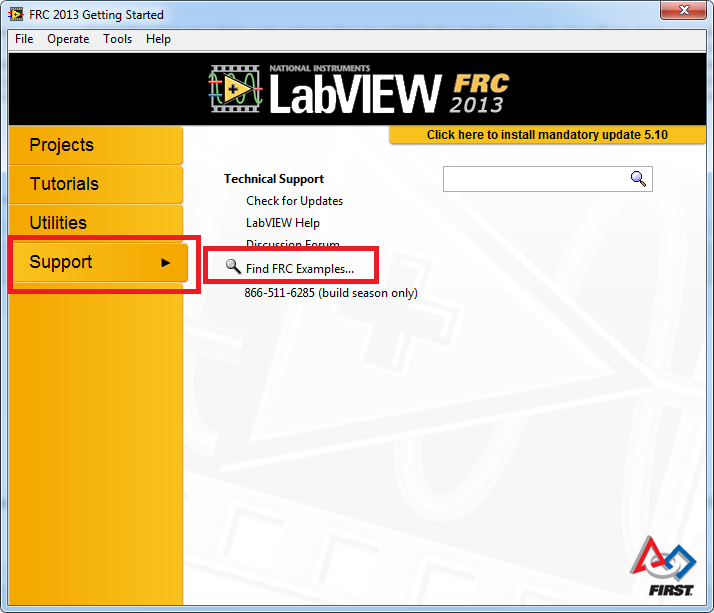
In the examples section, you will find a multitude of topics regarding the FRC robots. Look into the examples and simply copy/paste code to be integrated to the cRIO robot template.
In addition, you can find really good training material at this link: FRC 2013 Basic and Advanced Training
Hope this helps!
- Aldo
Applications Engineer
National Instruments
02-12-2013 11:23 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Awesome! Thank you very much Mr. Aldo!! Ill get to this after school... This is going to help so much!..I'm in some deep do-do right now, with not relay knowing what to do.. but thanks!!! I can finaly get back on track!
