- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Generate Code Tank Drive Not Working
10-03-2013 12:19 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I set up my game pad as tank drive and used the generate code to create Teleop code. When I run the code through the remote control editor as a Teleop test (the one where you can select the program to run) everything seems to work and the robot drives properly. When I plug in the Samantha module and try to play a match through the FCS the right wheel spins all the time and doesn't respond to changes in the joysticks, but the left wheel seems to react as expected. When I switched to Left Arcade configuration it ran properly with FCS. Thanks.
10-03-2013 03:45 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
This sounds like the switch on the bottom of the game pad might be in the wrong position. It should be in the "D" position.
10-06-2013 06:28 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
That was it. The gamepad was in X instead of D. Thanks for your help.
10-25-2013 11:11 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
We are a rookie team having a similar problem.
1. Autonomous is fully functional
2. Program Chooser picks the correct teleop program and operates (as seen by display text)
3. Controller is in D position and works when testing via Labview.
4. The controller will not work in Teleop mode.
We are stumped and have spent a great deal of time searching for answers. No luck so far. Any help would be appreciated.
7351
10-25-2013 11:25 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Just to clarify, when you run the teleop program through the remote configuration test everything runs correctly. It's only when you try to run through FCS and use your Samantha module is when the issue comes up. Make sure that your bluetooth is off on your NXT and double check the controller is in D. Have you tried re-generating the teleop code under a different name and choosing that with the program chooser. The other thing is to verify the schematic diagram matches your actual layout, but if your autonomous works it is probably OK. Here is the result from our generate code for tank drive teleop.
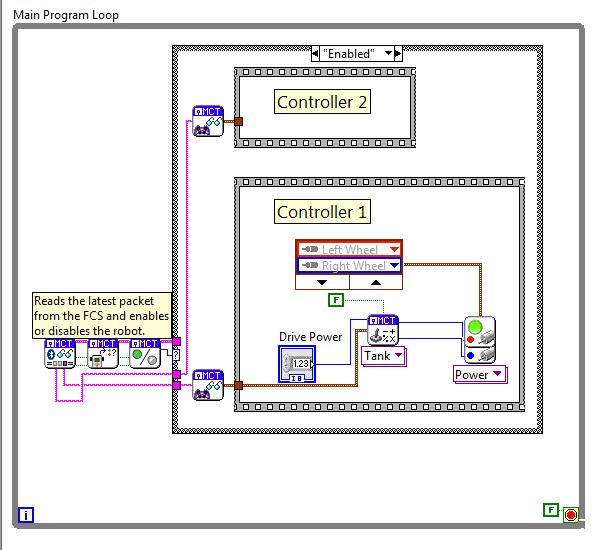
What is the robot doing exactly? Does it not move at all or does one motor work all the time and the other one doesn't? Have you tried downloading a different drive scheme like Arcade to see if it behaves the same? Thanks.
10-26-2013 09:57 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Thank you so much for your fast reply!
Unfortunately, turning bluetooth off has not fixed our problem. To recap, the (sample) robot is fully functioning when tested via wireless in Labview. Teh controller acts as intended when with Labview. The program chooser file is seeing the correct teleop program as seen by the FTCConfig.txt file. When switching to the FCS to attempt a simulated match, autonomous works correctly but when the event move to teleop the robot switches programs (as seen by text on the display) but will not receive signal from the controller (which is in D with the mode button set to off 'no light'). We have compiled code to simply run tank for testing purposes and it matches your code exactly from what we can tell. No success. We then added a short autonomous routine within the teleop to test that the program actually works. It runs the autonomous portion of the teleop code but still will not see the controller for operation.
We have uninstalled all programs and reinstalled and tried various naming conventions when uploading files but with no success. We are so close, but the lack of ability to operate the controller from the FCS has deflated us and taken away time to make further progress. This has been a multi-hour/multi-week adventure with no luck.
I would say this is challenging, but it has become frustrating. Thanks again for trying to help us through this challenge. Any additional ideas would be welcome as we are at a dead end.
7351
10-28-2013 12:20 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
We are having similar frustrations with the new LVLM 2012. There is a lengthy discussion regarding this in the thread https://decibel.ni.com/content/message/60842#60842 where you may find some ideas (solutions) that will keep you moving forward. (NOTE: We are a 3rd year team and have reverted to using the 2010 version we had installed last year until ni can get this fixed.)
10-28-2013 09:39 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Thanks for the feedback and helping a rookie team out. Since the earlier poster has resolved their issue, I will merge this with the other thread you note. If not aligned, I will initaite a new thread.
7351
10-28-2013 11:17 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
jmarkesino:
I noted in your code pictured that the 'create control' motors on your 'Move DC Motors' block (Left Wheel and Right Wheel) are grayed out. Are you sure that your code will deploy and work? You will probably find it necessary to re-enter those constants. If you only get 'Lego Motors' to choose from, then you will be experiencing a problem a few teams have been having. It has been discussed in the thread I just referred 7351 to. I am starting a new thread entitled 'LVLM 2012 Trials and Tribulations' to discuss these issues. Please, share your experiences (especially the successes).
10-28-2013 11:49 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I just pulled the example code from one of the old projects that I saved. I'm pretty sure it worked on the real robot, but maybe my schematic had changed since I made that version and that is why it is greyed out. Thanks.
