- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
How to use 4 encoder at the same time?
11-19-2013 08:11 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I'm using a set of macanum wheels so I want to control four wheels at the same time to achieve omni-direction moving. But the distence moving always work one by one, so there are only two wheels working at the same time. How can I deal with it?
11-19-2013 03:18 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
hi Jerry,
We are playing around with a holonomic (omni-direction) robot chassis this season also.
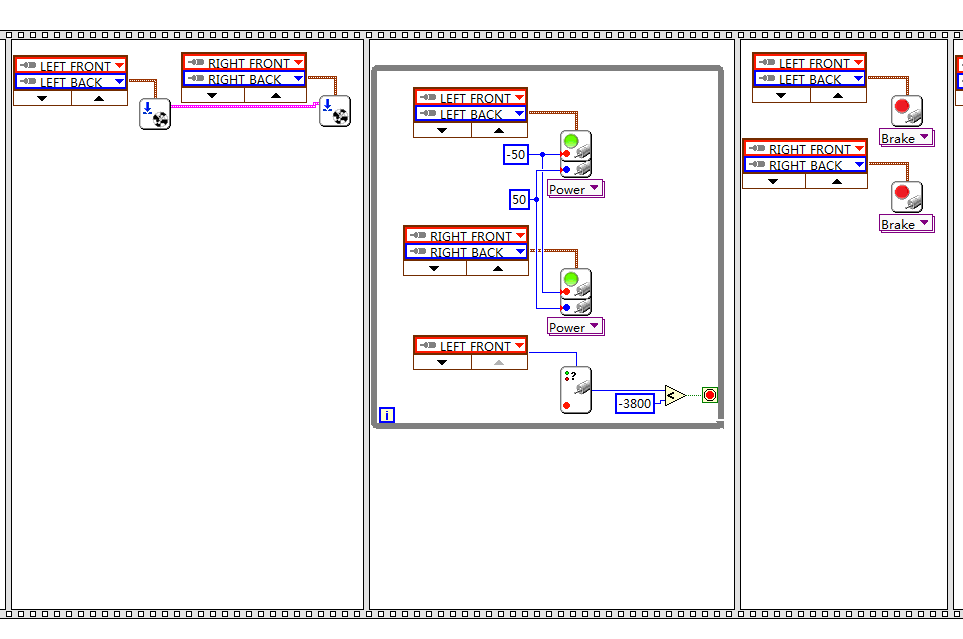
Are you talking about this when writing autonmomy? I have a attached a screen shot of what I think you want to know how to do.
Each vi can only work with one motor controller at a time.So to operate 4 motors at the same time you will need 2 instances of the vi linked to the sequence of events (NXT pink wire) as shown.
{kind=link}
11-19-2013 07:24 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I tried this way last time, and it didn't work, too.
11-19-2013 07:46 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
In that case I would try to put the vi's into a structure in the stream.
Some structure where a pink strand feeds in and out.
Maybe a while loop that runs one time - exiting based on completion of both vi's?
r
11-19-2013 11:37 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
If it is code related maybe you could try putting the movement in some kind of structure that is pink-stranded (NXT) in your autonomy sequence.
Maybe a while loop that runs one time, and exits when both 'distance moves' are completed.
It may be motor controller related. There are some posts in the FIRST FTC forum about the 2nd motor controller in the daisy chain not working right.
You could try controlling 3 lego motors individually using the 'distance vi' in whatever LabVIEW code 'pink-stranded set-up' you have. This might point toward a MC issue, and not a software structure issue.
We have been testing our systems with a single motor controller so far (waiting on parts). This weekend we will be working with 3 motor controllers daisy chained. I'll share what we find out.
11-22-2013 11:36 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hi jerry_dcjx and Lori,
I just wanted to follow up and see how things were going with this. Were you able to accomplish what you were trying to do? If not, let us and we'll see what we can do (althought it probably won't be until after Thanksgiving since most of us will be out of the office next week).
- Aaron
11-26-2013 09:15 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
well, I have tried many ways, I think it might only works when i creat two sub vi and make them run together, but i haven't try it.
I just use a structure in the picture to read the encoder, though there might be some error between wheels.
Actrually the atunomous program is finished now, and it works really good. we can now do both the ir becon block and the stop on ramp missions.
11-26-2013 09:43 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Jerry:
Is this a sample of code that is working for you? or is NOT working the way you want?
What is the goal of that piece of code (diagonal movement)?
We spent the weekend working out the 'teleop', and came up with an approach we like. We did have a few struggles. We are able to have all 4 wheels moving at one time, and can have the robot move in all sorts of directions (the wheels are operated as matched pairs).
Our next step is to employ a 'compass sensor' to keep the controls oriented to the driver and the field (instead of the robot).
I like to here that you were able to write autonomy that works well. That is our next step.

