- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
teleop controller button no response
Solved!10-31-2013 10:20 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
In the pictures bellow is my program. Only the button part of the controller 1 cannot work. I have tried to invert controller 1 and 2, than controller 2's botton is not working. So i guess it was the program's problem.
I have also tried only replace the botton part, and the part with that case structure dose not work. (the thing in the case works.)
Is there any team can deal with the conflect between those structures?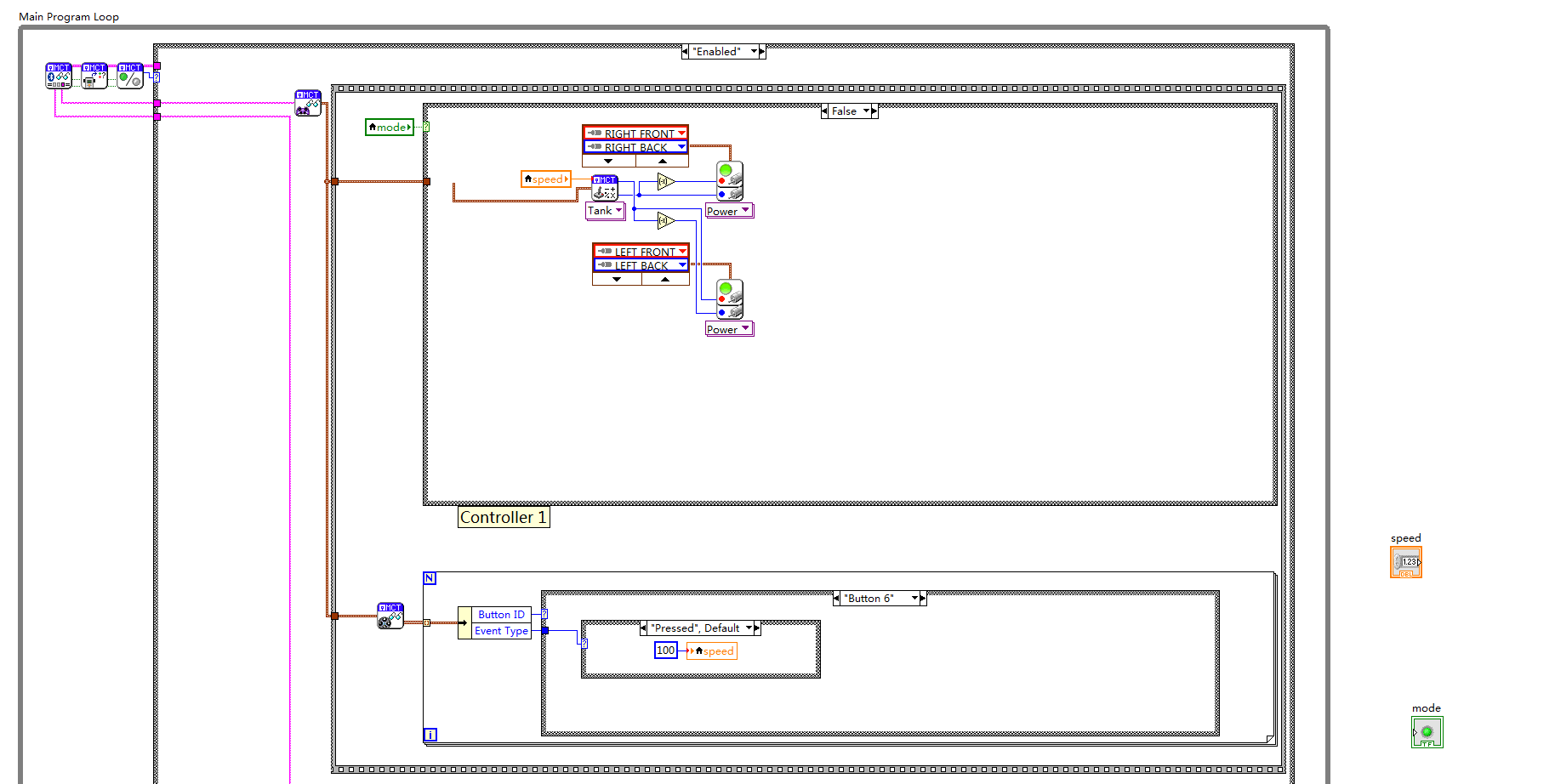

Solved! Go to Solution.
10-31-2013 01:01 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
The "mode" button you have is an indicator this is designed to display info and will not work from the front panel. Right-Click on the LED and select change to control, this will convert it to a clickable button. You can then wire the terminal directly to the case structure so you don't have to use the local variable.
10-31-2013 08:59 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
there is a button that set the mode to "t" of "F".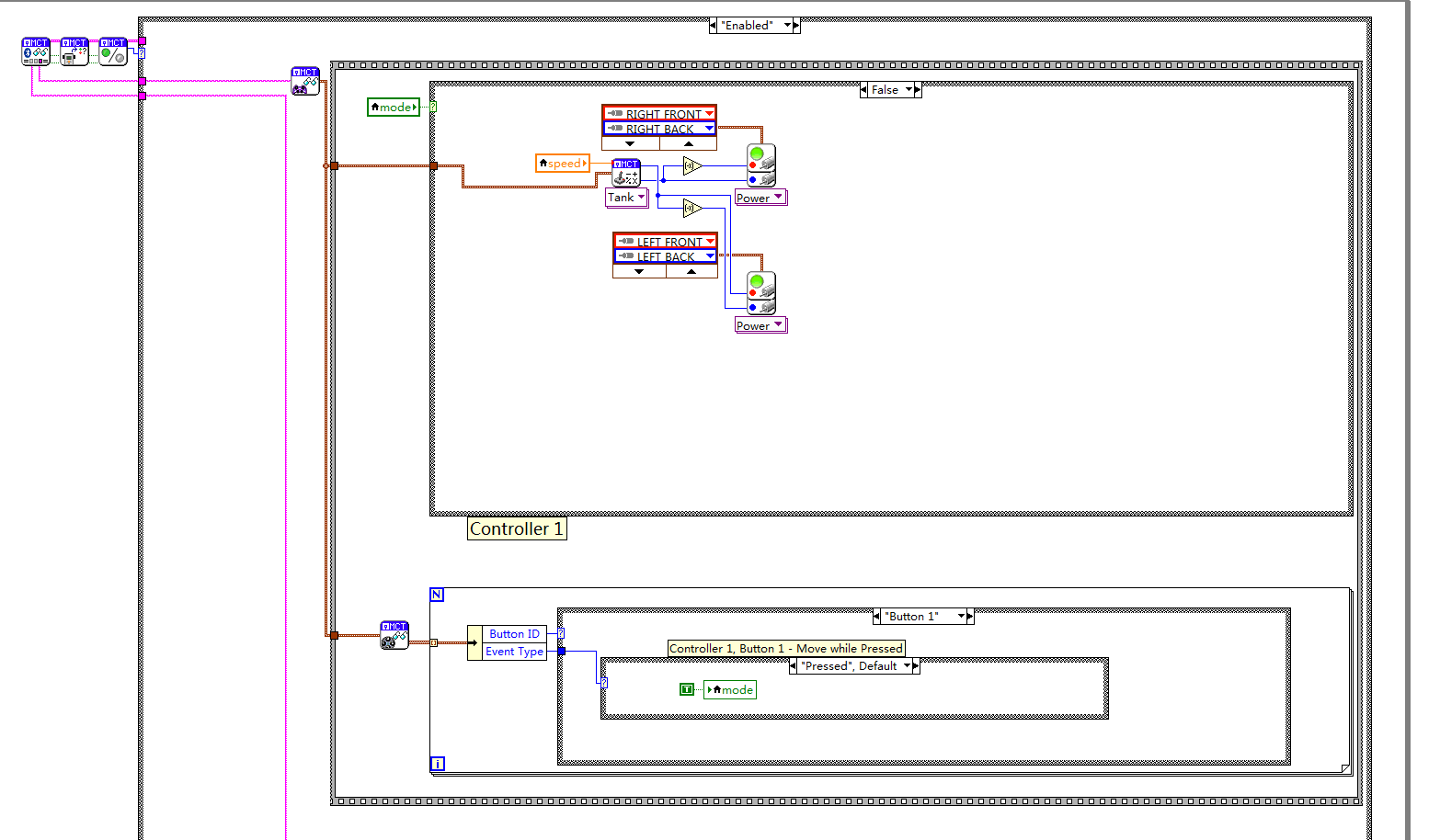
11-01-2013 01:41 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Jerry:
Where are you running from: RC Editor (Prototype or Teleop) or from a wi-fi FCS?
Have you been able to confirm that the 2 controllers you have connected to the PC are actually connected and functioning properly?
I'm not sure what your initial problem defines exactly. If one controller works, and the other doesn't then I would expect connection issues.
Although I haven't seen your complete code, I expect that you are switching MODEs so the robot will change the way it moves (ex.diagonal motion or spin) and that other buttons are changing your speed.
Is your problem that both controllers are functioning, but none of those kinds of changes in MODE and SPEED are happening?
11-01-2013 01:54 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I'm running it on rc editor teleop mode. I have confirm that the controllers are all working. But the button does not work.
11-01-2013 01:56 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I have tried many different way to place the structures, and finally i found that one of the for loop does not work at all. I don't know what happens to the structure, the second for loop doesn't work no matter i replace it or delete everything in it.....
11-01-2013 02:13 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
One thing I noticed in the code regarding SPEED is that it is a data representation DBL (orange). Speed is usually an I8 representation (blue). It will save you a couple bits/bytes in the compile to keep the data representations as small as possible.
I sent you a friend request. I'd be happy to look at the entire piece of code if you'd like to email it to me (or post it here). I can try it on my installation and give you some feedback.
I know that we have had some 'race' situations when we used local variables, and they didn't appear to update they way we thought they would. There are topics that address that.
You seem pretty comfortable playing with the code...an effective way we debug is to use some extra light sensors and mount them where we can see them. We turn the light sensor(s) on and o ff to indicate what part of the program we are in. Line them up and create BINARY numbers! We found that using sounds would interfere with timing too much.
I agree with Hueter's suggestion to keep 'variables' as controls instead of indicators. I'm not sure what kind of difference that really makes in the way we use local variables, but it does make sense for it to be a 'control',
11-01-2013 08:58 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I have been using lvlm for three years, and this situation only happens after I update to 2012. I usually use the display screen on the NXT to check my program, and in this time, I displaied the loop iteration on the screen.
The number i saw for the first loop is continue changing from 1 to about 14, but the second one does not change and show only a 0. The only situation I can come up with is the second for loop does not work at all.
If you want to see the program, i can send it to your email, but the project is really mess since i have generated code for about 6 times, and all the program are nearly the same.
11-01-2013 03:10 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Jerry:
Yeah, we've been having some major issues with LVLM 2012 too. We're actually sticking with 2010 until the bugs are ironed out. (I have one laptop running 2012 (via download) as our 'control').
I'm glad to hear that we're not the only ones with what appear to be 'deep' issues. I know that we are 'up to date' on our versions, but problems persist. I just rcvd my LV on disc and will try that install.
It's sometimes hard to tell the difference between a rookie team's question, and a vetern team's question. There are so many places that 'things can go wrong'.
To date the only solution offered has been to do a lot of restarting of LV - it does seem to fix some issues. I have found my vi's spontaneously reverting to computer targets, and if we 'download & run' from the RC Teleop - it will actually compile error-free and download that vi to the brick (that computer target!). When this happens, nothing works.
It's great to have someone else out there helping to track these issues. You can send just a .vi, or the 'share' of the entire project (my 2012 projects are a mess now too, with 'tests'). You should be able to see my email in my profile 'friend'.
11-03-2013 01:42 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
This software for NXT and TETRIX is TOTALLY USELESS!!!!!
I put one EXACTLY SAME program to 2010 and 2012 version lvlm, and download them to nxt.
The result makes me so surprise that the only thing I come up is to use robotc instead of lvlm.
In 2010 version, the HS755HB servo does not work, they only accept the first command and then locked at the very first position, but the button works well.
In 2012 version, the button of controller 1 DOES NOT WORK AT ALL!!!! I just don't understand how this happen, because the program i use is just the program i use in 2010ver.
If the hs755hb controlling is new in 2012, then i won't blame the 2010version lvlm. But why the compiling of 2012 is not even better than 2010?
I know NI increase the speed of compiling, is that increase of speed come from cutting a part of the program?????
Who can tell me where can i report a bug? If I cannot solve this program before wednesday, I'll probably change to robotc, because the first match of our team is on Dec 1st.
